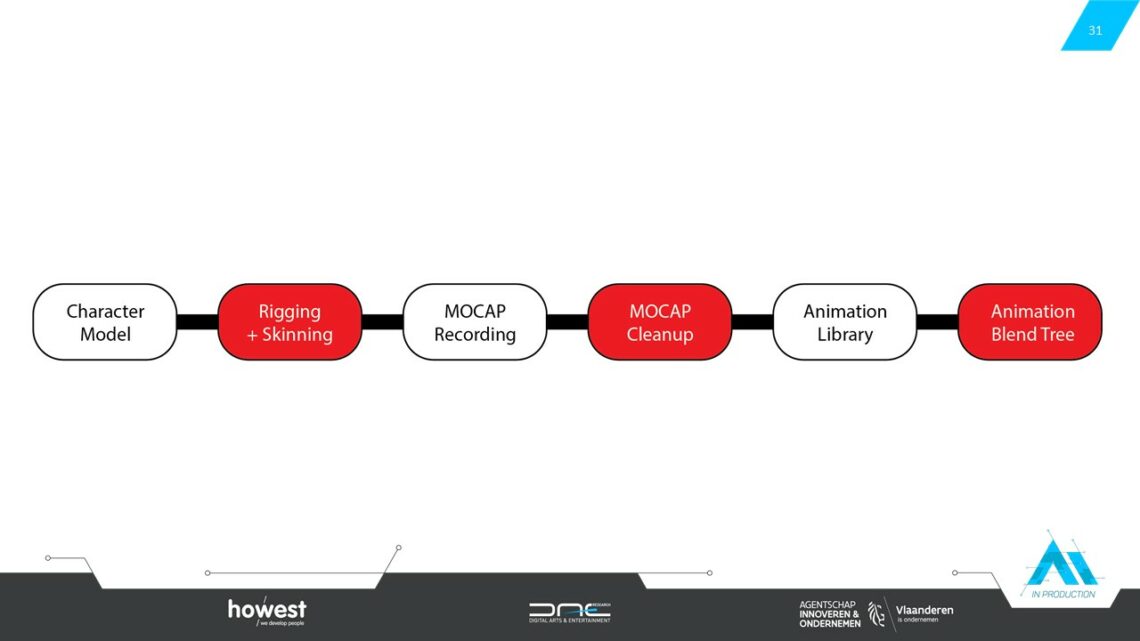
Use Case Systemic Animation
In de use case rond systemic animation zullen we aan de slag gaan met het concept van de IK-rig voor procedural pose animation.
Uit het voorbereidingsjaar was duidelijk dat er bij “Datagedreven Animaties” (waar we later dit jaar binnen een use case rond zullen werken) nog een belangrijke component mist, namelijk de artistieke controle over het eindresultaat. De IK rig voor procedural pose animation is een voorbeeld van een systemic animation solution, deze manier van werken staat ons toe om het door AI-getrainde datagedreven model nog verder te customizeren op basis van context-bewuste aanpassingen, of “regels”.
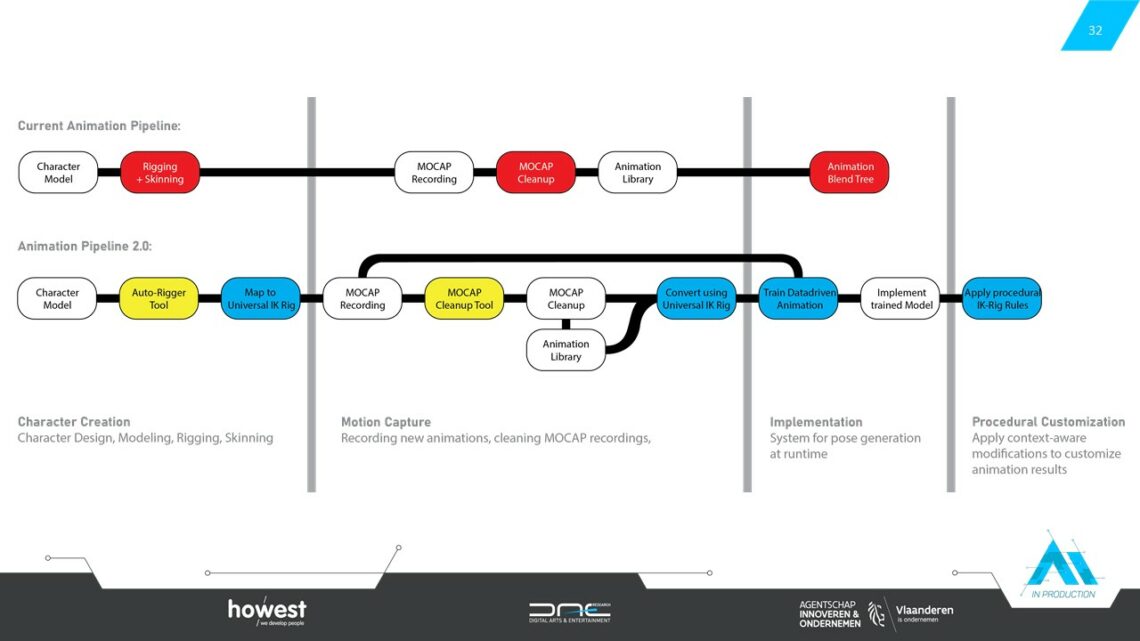
De essentie van de Procedural IK Rig is deze; We ontkoppelen de animaties van de rigs door elke animatie op elke rig te converteren naar Inverse Kinematics ketens. Door dit te doen, brengen we alle animatie-data van gelijkaardige karakters (bipeds, quadrupeds) naar één gedeelde vorm. Eens we onze animaties omgezet hebben in IK ketens, passen we context-bewuste aanpassingen toe op deze ketens. We “animeren” zo niet de keyframes, maar de MOCAP animaties zelf, op basis van conditionele transformaties. Als laatste converteren we dan het resultaat naar eender welke andere rig.
Deze manier van werken staat ons toe om heel wat verschillende zaken op een procedurele manier op te vangen, waaronder een soort retargeting 2.0, het staat ons toe om eender welke animatie op eender welke rig af te spelen, het staat ons ook toe om de stijl van onze animaties aan te passen, de characters te scalen en hun properties wijd te laten variëren, het geeft ons een mogelijke route voor prop interactie, het staat ons toe om de snelheid van locomotie-animaties procedureel aan te passen, en geeft ons een mogelijke route voor terrain navigatie en avoidance.
Binnen dit project zullen we trachten zo’n systeem zelf op te zetten. Het doel van deze use case is om de limieten van zo’n systeem te testen, om een goed idee te vormen van hoelang het duurt om zo’n systeem te implementeren, hoe gemakkelijk het systeem in gebruik te nemen is, en waar de mogelijke tekortkomingen van zo’n systeem nog liggen.
Binnen de TETRA zullen we dus binnen twee use cases werken rond het datagedreven animatie-systeem, en het procedural IK rig systeem.
Onze stagiair, Arne, zal binnen het eerste deel van zijn stage kijken naar de Auto-Rigging tool, en mogelijks in een later deel naar de motion capture cleanup tool.
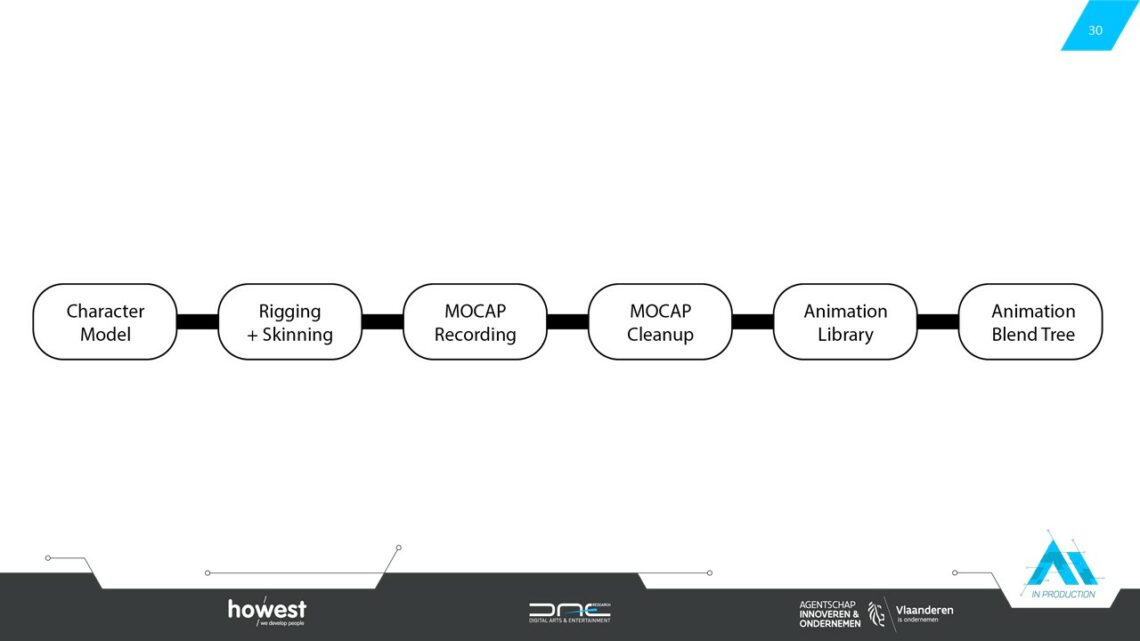
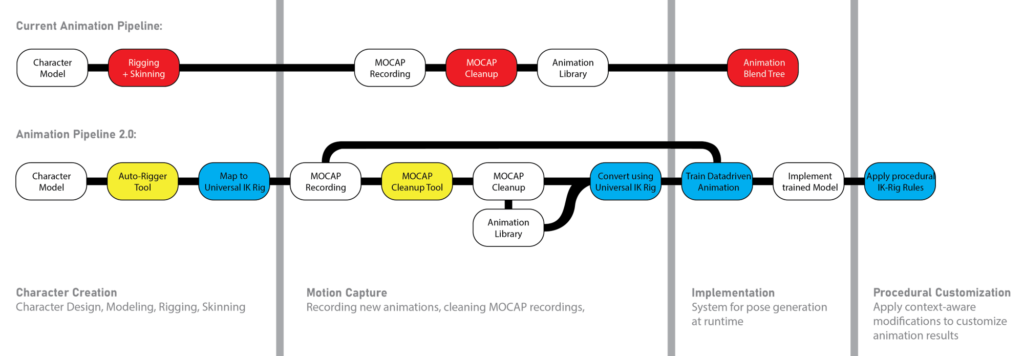
Doorheen deze TETRA zullen we dus binnen de Animation use cases een reeks technologieën bekijken en onderzoeken die samen de basis leggen voor een potentiële geüpdatet animation pipeline voor games.